

title: 如何通过图像中已知角点坐标反求相机位置:PnP外参估计实践
slug: pnp-extrinsic-calibration-practice如何通过图像中已知角点坐标反求相机位置:PnP外参估计实践
摘要
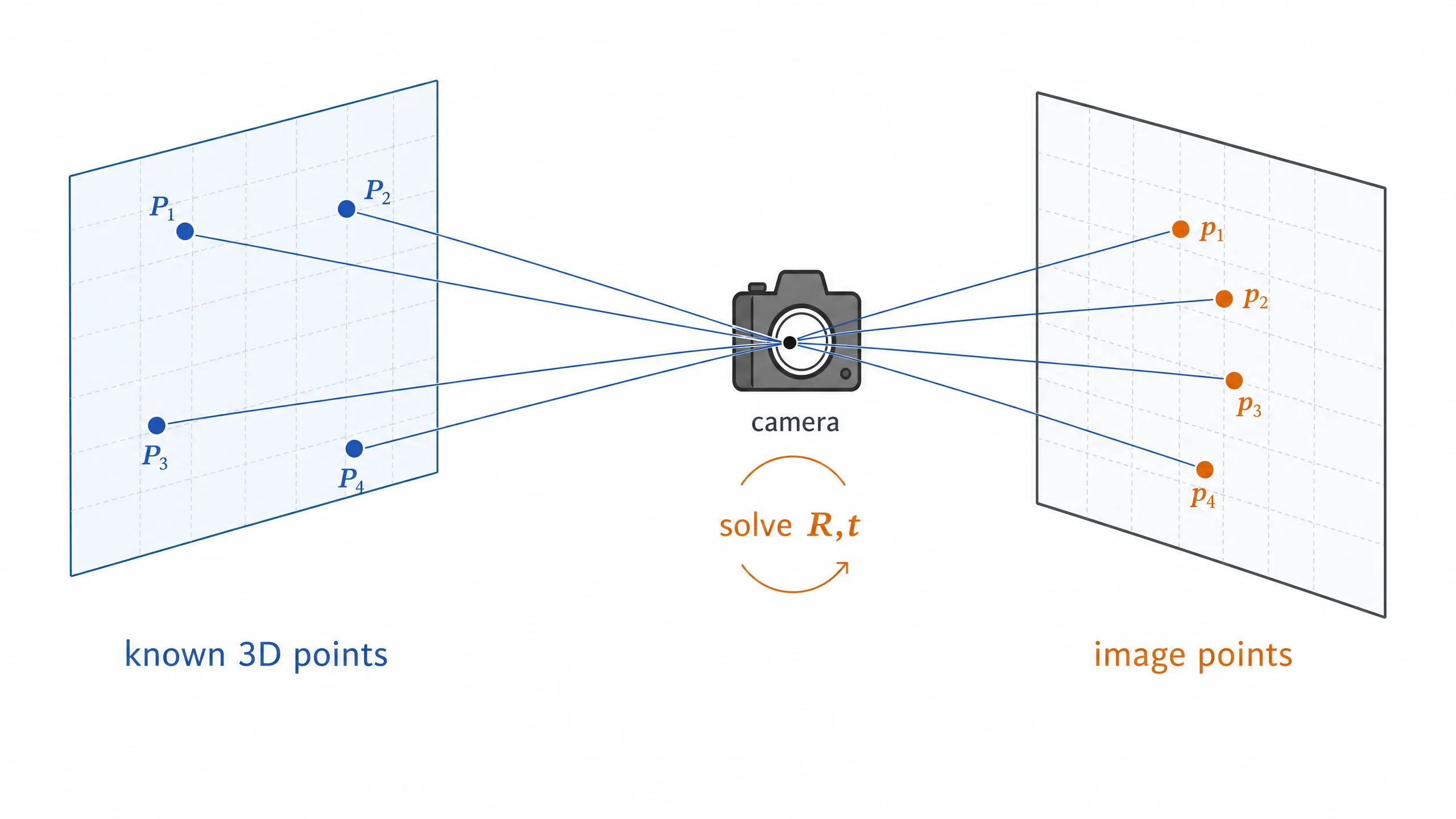
已知相机内参,已知场景中几个点的 3D 坐标,从图像中找到这些点的像素位置,求解相机在三维世界中的位姿——这就是 Perspective-n-Point(PnP)问题。
本文围绕 PnP 展开四部分内容:问题的数学定义与求解方法,solvePnP 输出 tvec 的常见误解,一个将完整流程工程化的开源工具 cam2body-calib,以及坐标系相关的一組实践问题。PnP 算法本身已经非常成熟,实际工作中出问题的地方几乎都在坐标系定义上。
本文涉及的工具已开源:ruali-dev/cam2body-calib(Apache 2.0),提供 Web UI 和 CLI 两种使用方式。
写在前面
这个开源的工具是实习任务中遇到了这种问题,写出来的小工具的演化版本。
1. 问题的数学定义
已知:
- 相机内参 K(通过棋盘格标定获得)
- 畸变系数 D
- N 个标志物点在世界坐标系下的 3D 坐标:
P_world_i = [X_i, Y_i, Z_i] - 这 N 个标志物点在图像中的 2D 像素坐标:
p_i = [u_i, v_i]
求:
- 相机相对于世界坐标系的位姿,即旋转矩阵 R 和平移向量 t(合称外参)
这个问题称为 Perspective-n-Point(PnP)。
2. PnP 是怎么解的?
2.1 基本思路
OpenCV 的 solvePnP 完成这件事:建立 3D 点到 2D 点的对应关系,通过最小化重投影误差来优化 R 和 t。
min_{R,t} Σ_i || project(K, R, t, P_world_i) - p_i ||²
其中 project 表示用针孔模型将世界点投影到图像平面。
2.2 RANSAC 的作用
当点对数超过 4 对且可能存在误匹配时,使用 solvePnPRansac。它随机采样多个子集分别求解,选出内点数量最多的结果,自动排除 outlier。
2.3 最少需要几个点?
P3P 只需要 3 个点,但 3 个点存在多解歧义,需要第 4 个点来确定唯一解。工程中至少使用 4 个点,点数越多结果越稳定。
3. 旋转矩阵、平移向量与相机外参
3.1 关键误区:solvePnP 输出的是什么?
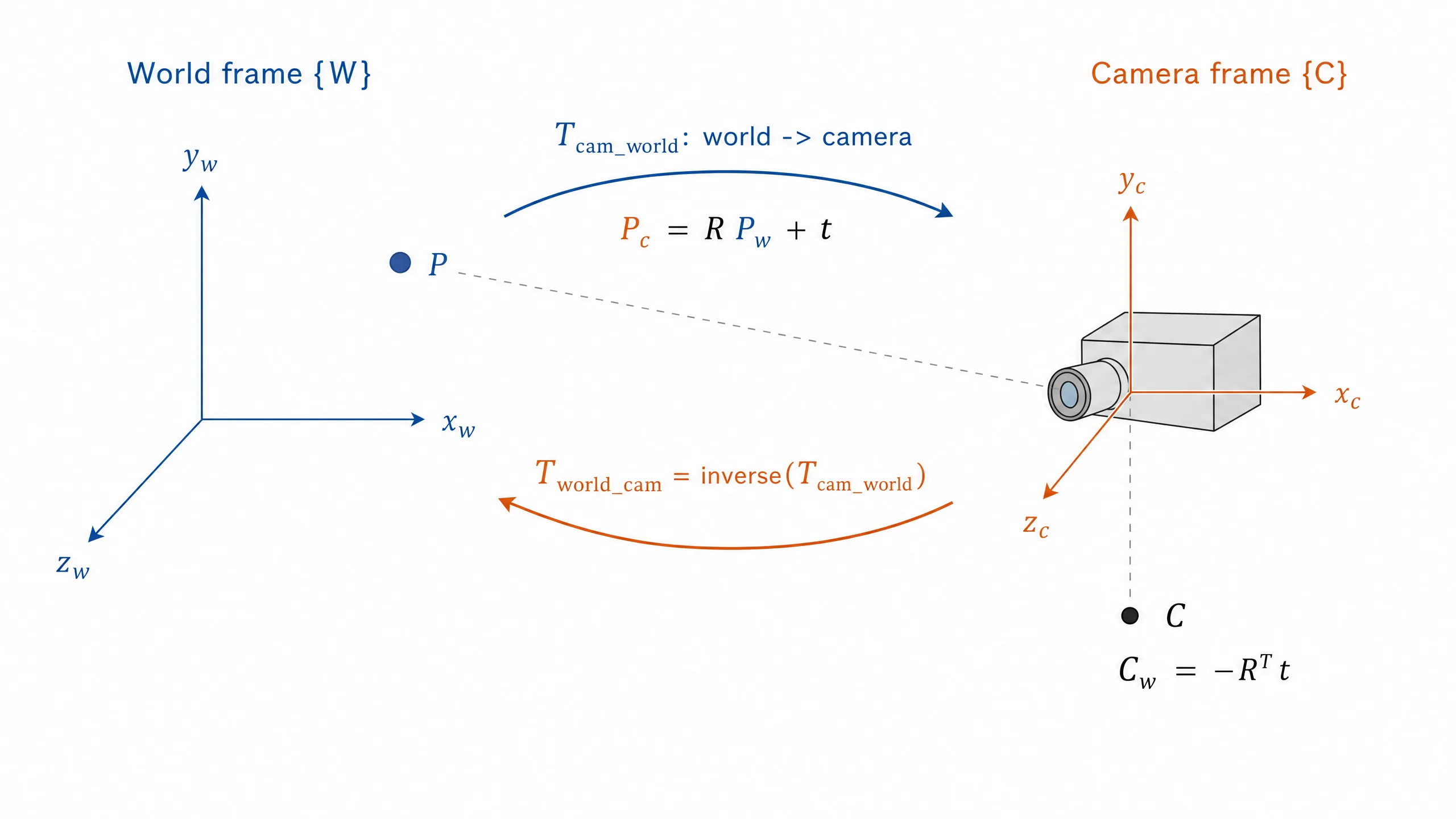
solvePnP 返回的 rvec 和 tvec 满足:
P_camera = R · P_world + t
这个等式的含义是将世界坐标系的点变换到相机坐标系。solvePnP 输出的是"世界在相机坐标系下的表示",而不是"相机在世界坐标系下的位姿"。
写成齐次变换矩阵:
T_cam_world = [ R t ]
[ 0 1 ]
这描述的是从世界坐标系到相机坐标系的变换。
3.2 真正的相机位置
相机在世界坐标系中的坐标需要取逆得到:
T_world_cam = inv(T_cam_world)
T_world_cam[:3, 3] 才是相机在世界坐标系中的位置。solvePnP 给出的是"世界到相机",需要的是"相机在世界",做一个矩阵求逆即可。
4. 重投影误差:如何判断结果好坏?
4.1 什么是重投影误差
用求解得到的 R 和 t,将已知的 3D 标志物点重新投影回图像,与原始检测到的像素坐标比较:
reproj_error_i = || project(K, R, t, P_world_i) - p_i ||
4.2 判断标准
| mean reprojection error | 评价 |
|---|---|
| < 0.5 px | 优秀 |
| < 1.5 px | 良好 |
| < 3.0 px | 一般,需要排查 |
| > 3.0 px | 不可信,大概率存在错误 |
4.3 除了数值还要看图
误差小不代表结果正确。需要检查可视化结果:检测到的角点和重投影点是否基本重合。如果图像对齐良好且误差小,PnP 主链路可以认为正常工作。如果图像明显歪斜但误差很小,通常是内参或 3D 坐标填写有误。
5. 工程实现思路
5.1 核心流程
输入图像 → 去畸变(如果是鱼眼)→ 手动点选标志物角点
→ 读取标志物 3D 坐标
→ solvePnPRansac → solvePnPRefineLM(可选)
→ 构建 T_cam_world
→ 取逆得到 T_world_cam
→ 计算相机位置和 RPY
→ 重投影误差分析
→ 可视化
→ 导出结果
5.2 手动点选的交互方式
基于 OpenCV 鼠标回调实现:
- 左键添加点,右键撤销上一个
- 滚轮缩放,中键拖拽平移
- 右下角放大镜辅助精确定位
- S 键保存并退出
对于鱼眼相机,先去畸变再点选。去畸变后的图像是常规视角,角点定位更容易。
5.3 模块化设计
将功能拆分为独立模块而非集中在单一文件中:
- 相机模型:管理 K、D、图像尺寸、去畸变逻辑
- 标志物布局:读取 3D 坐标配置
- PnP 求解器:封装 solvePnP + RANSAC + refine
- 可视化:绘制角点、重投影点、坐标轴
- 导出器:将标准结果转换为下游所需格式
后续更换标志物类型或输出格式时只需修改对应模块。
5.4 Export Profile 模式
核心计算在标准右手系下完成,下游系统可能需要左手系或其他格式的结果。通过导出适配层解耦:
核心层:标准 PoseResult(右手系,T_world_cam)
导出适配层(Export Profile):
- right_handed_pose6 → x/y/z/roll/pitch/yaw
- opencv_optical_matrix → 4×4 矩阵
- left_handed_pose6 → 左手系的 position + RPY
核心逻辑保持干净,适配层处理格式转换。
6. cam2body-calib:一个实际的 PnP 外参估计工具
以上是理论框架和设计思路。本节介绍基于这些想法实现的工具:cam2body-calib。
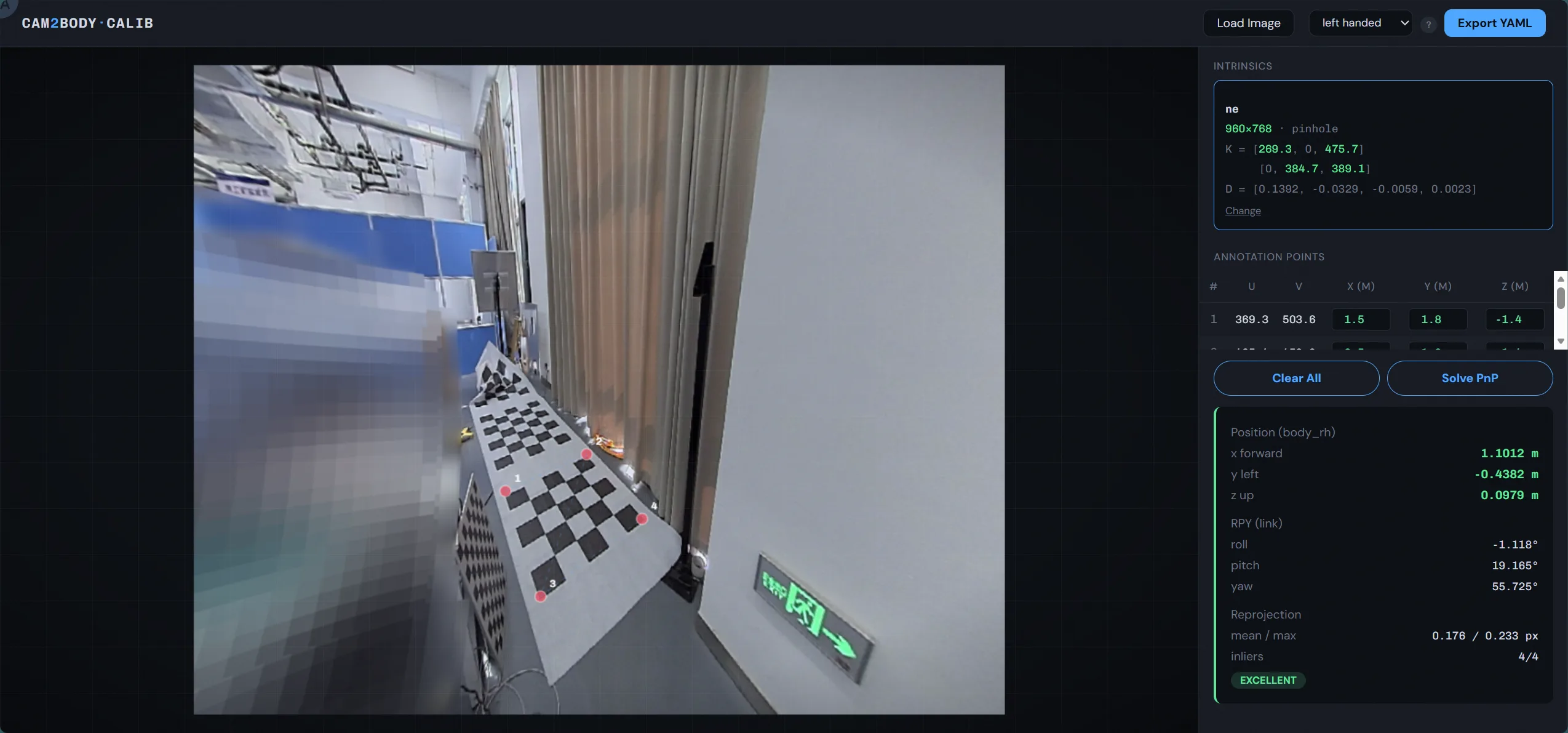
6.1 功能概述
工具的工作流:上传相机内参 → 拖入标定图像 → 在图像上点击四个标志物角点 → 输入这四个角点在车体坐标系下的 3D 坐标 → 一键求解相机 6-DoF 位姿。
典型应用场景:相机内参已通过棋盘格标定获得,需要确定相机在车体上的精确安装位置和朝向。平移量(x/y/z)可以用尺子近似测量,但姿态角(roll/pitch/yaw)难以人工量准。此工具通过在地面放置已知尺寸的标定板(或利用车体上已知坐标的固定点),拍摄单张图像后手动点选四个角点,即可解算出相机外参。
6.2 使用方式
Web UI 模式(推荐日常使用):
git clone https://github.com/ruali-dev/cam2body-calib.git
cd cam2body-calib
uv sync
uv run cam2body-calib ui
启动后在浏览器中完成全部操作——上传图片、标注角点、填写 3D 坐标、运行 solvePnP、查看重投影误差、选择导出格式。
6.3 工程结构
cam2body-calib/
├── src/cam2body_calib/
│ ├── camera/model.py # pinhole + fisheye,自动去畸变
│ ├── estimation/pnp_solver.py # solvePnPRansac + refine
│ ├── geometry/ # 4×4 变换、RPY、左右手系转换
│ ├── exporters/ # right_handed / left_handed 双 profile
│ ├── interactive/annotator.py # OpenCV 手动标注工具
│ ├── web/ # FastAPI 后端 + 前端 UI
│ └── cli.py # Typer CLI 入口
├── demo/ # 可直接运行的示例(内参 + 图片 + 3D 坐标)
└── tests/ # 31 个 pytest
几个设计要点:
- 鱼眼与针孔统一处理:无论镜头类型,统一经过去畸变后当作 pinhole 模型处理。使用
cv2.fisheye.estimateNewCameraMatrixForUndistortRectify+initUndistortRectifyMap完成,模型标记自动从fisheye切换到pinhole。 - PnP 求解链路:
solvePnPRansac(鲁棒初值)→solvePnPRefineLM(基于 inlier 精化)→ 构建 T_cam_body → 取逆得到 T_body_camera → 轴变换到 camera_link → 重投影误差分析。 - 坐标系隔离:核心 PnP 计算全部在右手系下完成,左手系仅作为导出层的格式适配。导出时使用
S = diag([1, -1, 1])做S @ R @ S转换,保证行列式为 +1。
6.4 导出格式
| Profile | Body 坐标系 | yaw 正方向 | 适用场景 |
|---|---|---|---|
right_handed |
x=前, y=左, z=上 | yaw>0=左转 | ROS REP-103 |
left_handed |
x=前, y=右, z=上 | yaw>0=右转 | 部分车辆工程系统 |
yaw 和 pitch 不依赖于欧拉角分解,而是直接从相机前轴向量计算,避免万向节锁问题。导出结果为 YAML 格式,可直接供下游系统读取。
6.5 精度参考
demo 目录中提供了可运行的示例:960×768 的虚拟针孔图像,四个标定点,重投影误差约 1-2 px,位置估计与安装尺寸吻合。实际工程场景中的精度受内参质量、标定点测量准确度和图像清晰度影响,但几何链路本身已经过充分验证。
7. 坐标系——实践中最易出错的部分
PnP 算法本身已经非常成熟。在实际工作中,绝大多数问题出现在坐标系定义上。
7.1 两个关键坐标系
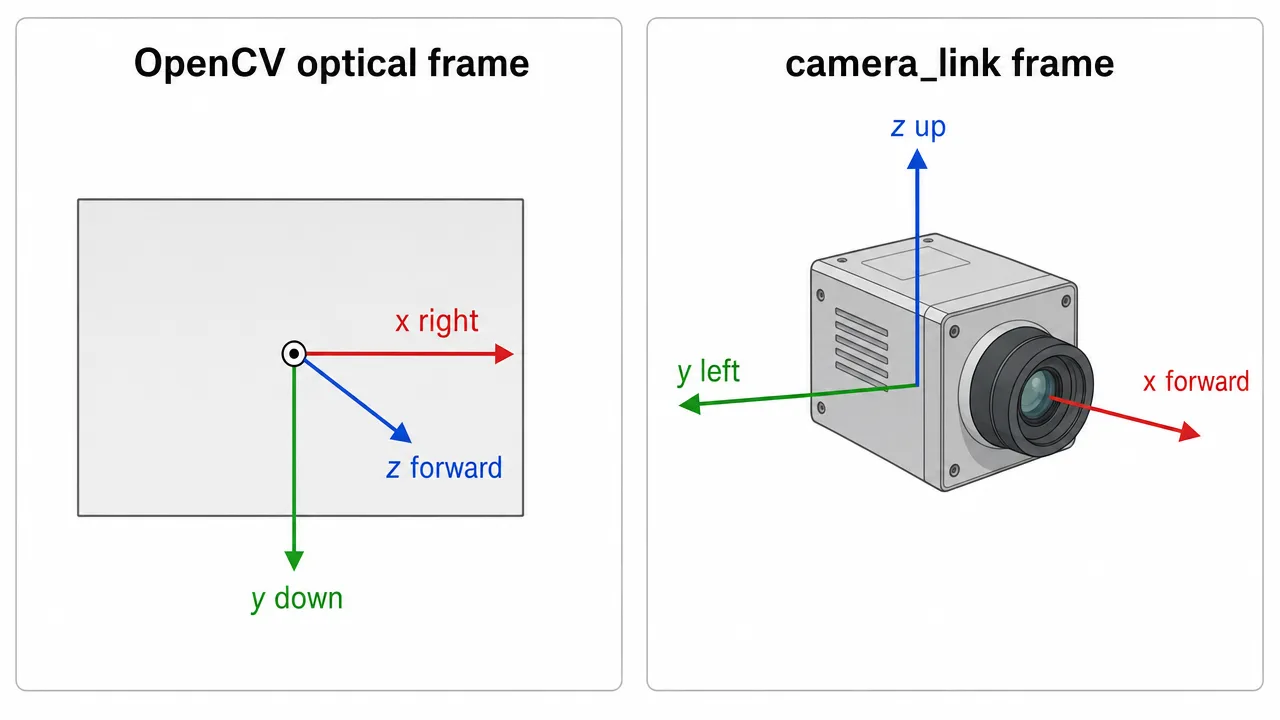
OpenCV optical frame(solvePnP 使用的坐标系):
- x 轴指向右,y 轴指向下,z 轴指向前(相机观察方向)
camera_link frame(ROS 和车辆工程中常用的坐标系):
- x 轴指向前,y 轴指向左,z 轴指向上
两者的轴方向完全不同。直接对 OpenCV optical frame 的旋转矩阵提取 RPY 会得到反直觉的数值:相机水平朝前时,optical frame 的 roll 约为 -90°,而非 0°。
处理方式:工具内部同时计算 optical RPY 和 link RPY。optical 用于 PnP 计算与调试,link 用于结果展示和下游对接。
7.2 左手系与右手系
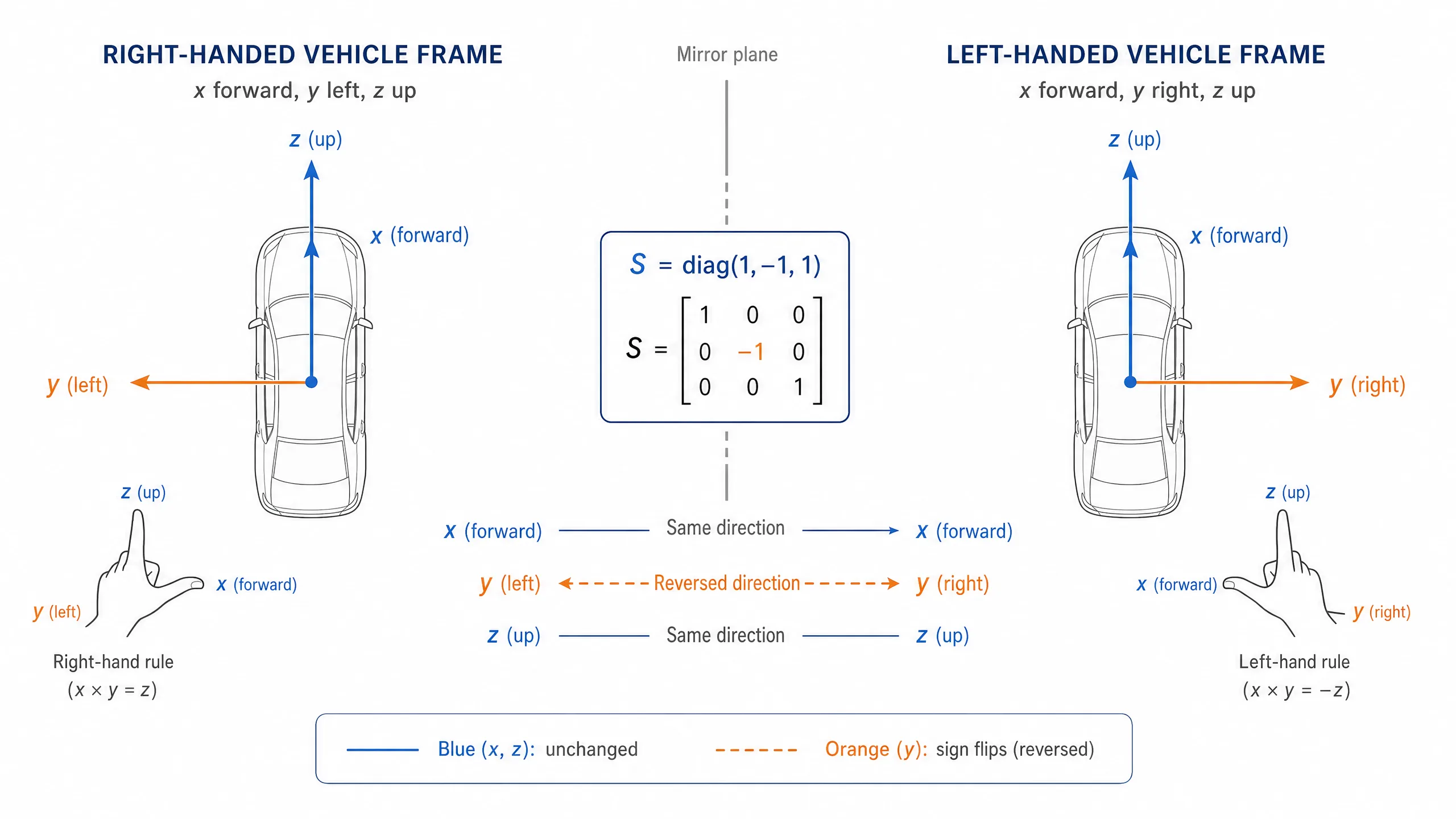
ROS 车体坐标系通常使用右手系(x 前, y 左, z 上)。部分车辆工程系统使用左手系(x 前, y 右, z 上)。两者的差异在于 y 轴方向。
7.3 左手系下提取 RPY 的正确方法
在右手系中得到旋转矩阵 R(det = +1),直接翻转 y 轴换到左手系:
R_lh = S @ R 其中 S = diag([1, -1, 1])
此时:
det(R_lh) = det(S) × det(R) = (-1) × (+1) = -1
行列式为 -1 的矩阵不是纯旋转,而是旋转加镜像。scipy 的 Rotation.from_matrix 会拒绝处理此类矩阵。
正确做法是同时镜像父坐标系和子坐标系:
R_lh = S @ R @ S
det(R_lh) = (-1) × (+1) × (-1) = +1
这样得到的矩阵行列式为 +1,可以安全地进行欧拉角分解。
7.4 万向节锁与 forward axis 方法
即使行列式正确,RPY 也存在万向节锁问题:当 pitch 接近 ±90° 时,roll 和 yaw 会耦合,数值失真。
对于相机外参估计,更可靠的方法是不依赖 RPY 矩阵分解,而是直接从相机前轴向量计算姿态角:
forward = R[:, 0]
yaw = atan2(forward_y, forward_x)
pitch = atan2(forward_z, sqrt(forward_x² + forward_y²))
这种方法不受万向节锁影响,物理含义也更明确:yaw 表示相机在水平面上的指向,pitch 表示相机的俯仰角度。
8. 小结
- PnP 是已知 3D 点坐标、2D 像素坐标和相机内参,求解相机外参的经典方法。
solvePnP返回的 tvec 是从世界坐标系到相机坐标系的平移向量,相机在世界坐标系中的位置需要通过矩阵求逆获得。- cam2body-calib 将 PnP 外参估计流程工程化为一个完整工具,支持 Web UI 和 CLI 两种使用方式,内置鱼眼适配、坐标系转换和多种导出格式。
- 重投影误差是主要的精度指标,但需要结合可视化结果综合判断。
- 坐标系问题是 PnP 实践中最容易出错的环节:optical frame 与 link frame 轴方向不同,左手系下需要 S @ R @ S 转换才能正确提取 RPY,forward axis 方法可以规避万向节锁。