© 2026 硅基之瞳

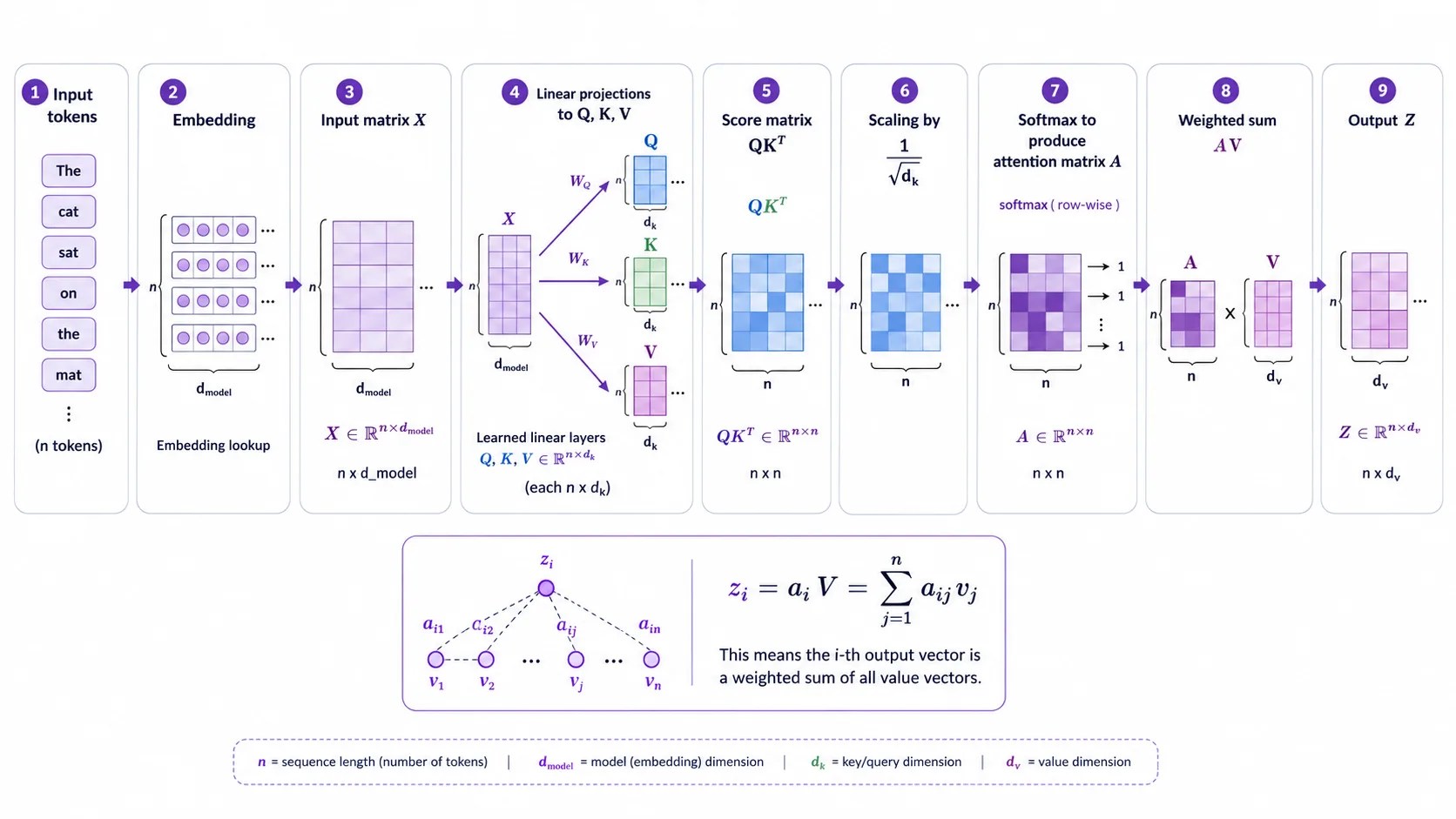
Transformer 自注意力机制详解:从单头推导到多头注意力
自注意力是 Transformer 架构的核心组件。它使模型在处理序列中的某个词时,不是孤立地编码该词,而是同时考察同一序列中所有其他词,计算它们与该词之间的相关性权重。本文从单个 token 的视角入手,再逐步展开为矩阵形式,依次推导 Q、K、V 的线性投影过程、缩放点积注意力的计算方式,以及多头注意力的拼接与融合机制。
33
|
0
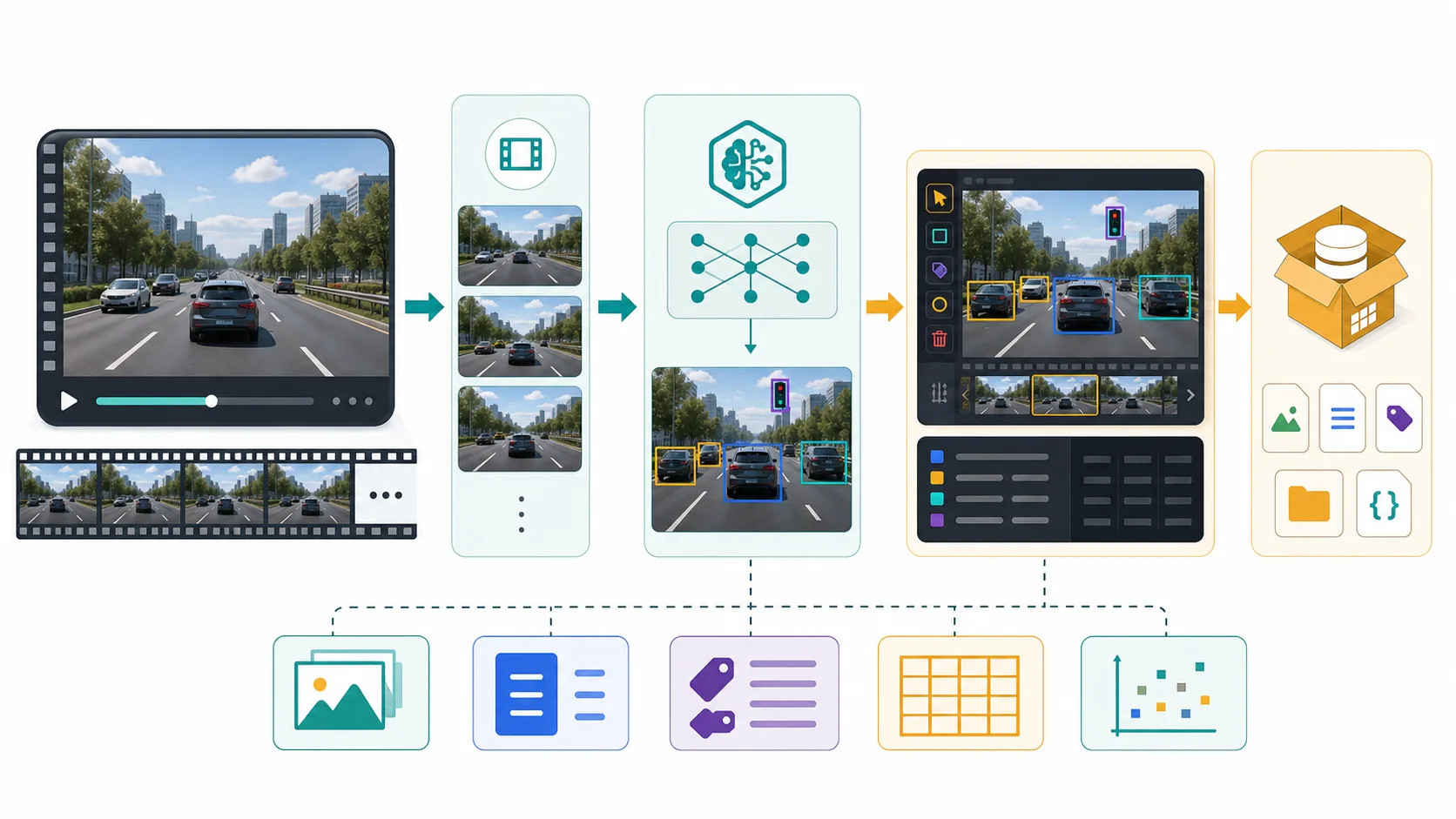
从 AI 生成视频到目标检测数据集:一次本地 VLM 标注管线的工程记录
从 AI 生成视频到 YOLO 能用的 COCO 数据集,中间隔着一整条工程管线。这篇文章记录了搭建过程:本地 Qwen3-VL做预标注,逐帧缓存保证任务可恢复,人工审核后再导出标准格式。
44
|
0
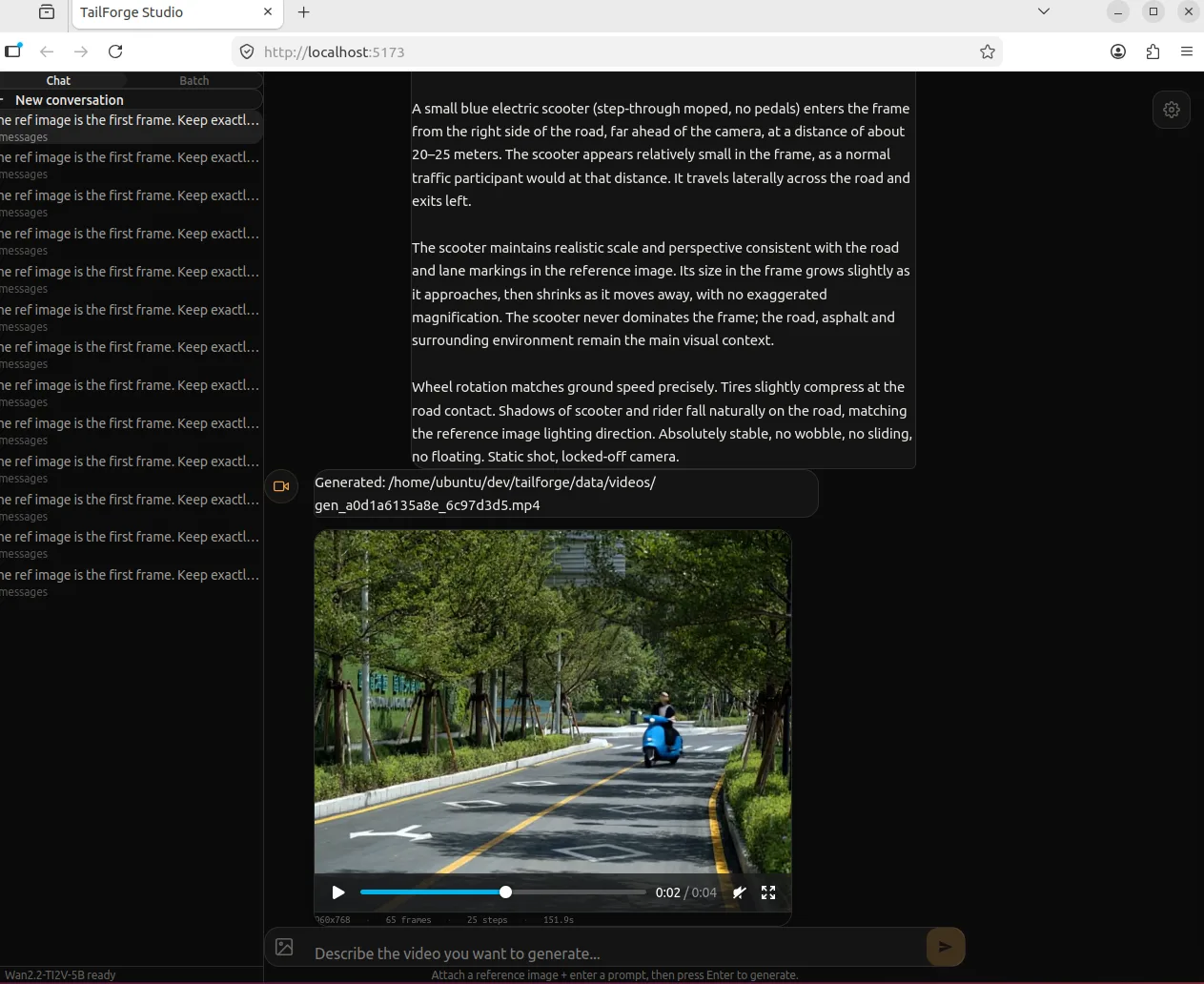
自动驾驶数据长尾分布问题:本地部署Wan2.2-TI2V-5B合成数据实践
上篇文章用即梦验证了视频生成模型合成长尾数据的可行性,但商业 API 成本高、数据要上传。这篇文章记录了在 RTX 4090工作站上本地部署 Wan2.2-TI2V-5B 开源图生视频模型的过程。围绕模型搭了一个工具(FastAPI +React),支持对话式单次生成和批量排队合成,生成后自动抽帧。
9
|
0
自动驾驶数据长尾分布问题:利用有世界先验的视频生成模型合成数据实践
本文记录了一次面向自动驾驶长尾数据问题的合成数据实验。针对真实数据中小动物横穿等低频目标样本不足的问题,尝试利用具备世界先验的视频生成模型,从真实道路图像出发生成小狗横穿场景,再通过抽帧构建候选训练样本。实验结果表明,相比传统贴图式合成,视频生成模型在接地关系、尺度、透视和运动连续性上更接近真实采集数据。后续工作将继续探索自动清洗、自动标注和真实验证集上的 Recall / mAP 评估。
16
|
0

自动驾驶多传感器融合建图:一次 IEKF-GNSS-LiDAR 排障实验的工程记录
接手一个 LiDAR-IMU-GNSS 建图系统,轨迹跟 GNSS 对不上。花一天排查:观测回调没注册、6-DOF 强约束拖歪姿态、1.4米杆臂补偿反致建图炸掉、坐标系对齐三组实验均未完全解决。一次排障记录。
20
|
0
4090 工作站软件维修记录
一次 Ubuntu 工作站维修的完整记录:从显示器无信号开始,经历 Safe Graphics 卡死、20.04/22.04 反复安装失败、绕路 Server 安装器、定位 fjes 冷门内核模块导致 udev 死锁、解决 GDM 启动慢与网络栈混乱,到最后发现热重启 kernel panic 并更换 HWE 6.8 内核。典型的洋葱式排障——一个问题解决之后,下一个问题才会露出来。
16
|
0

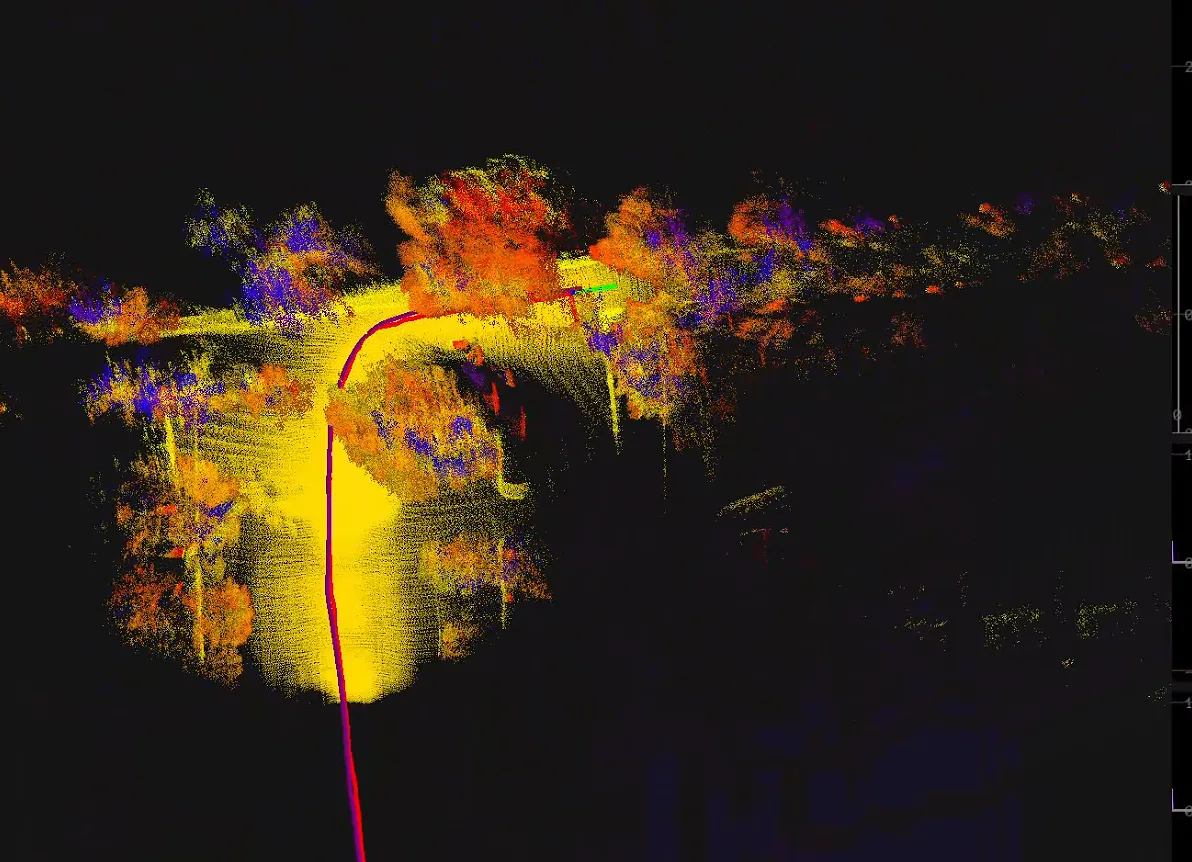
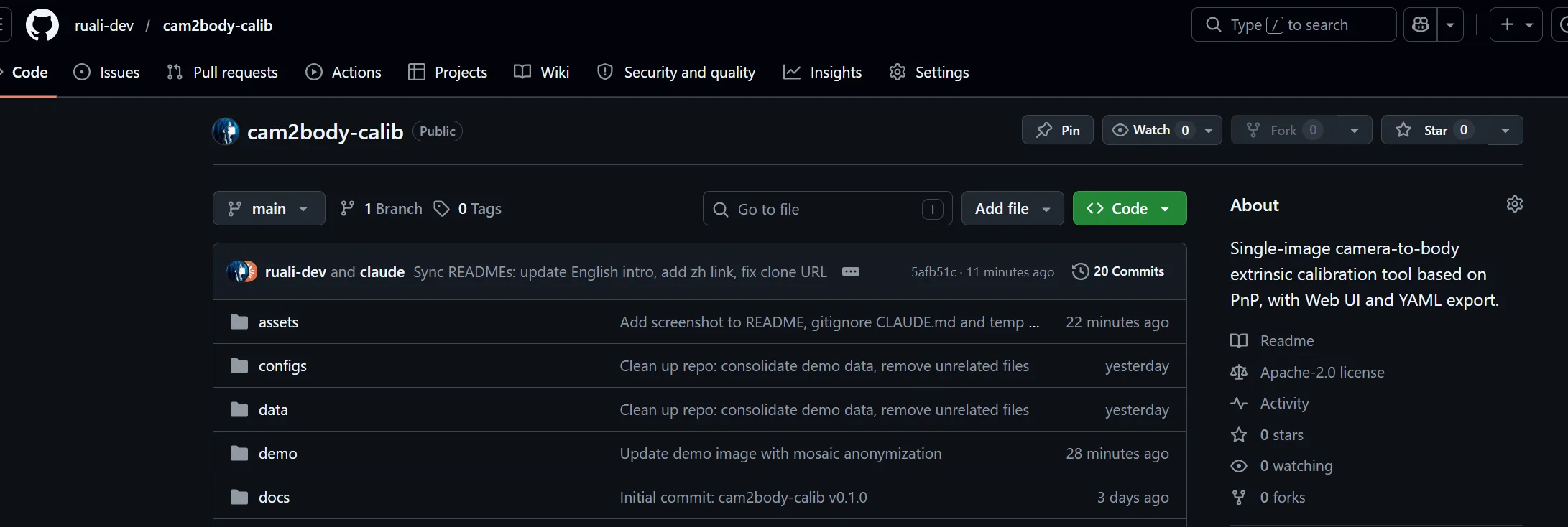
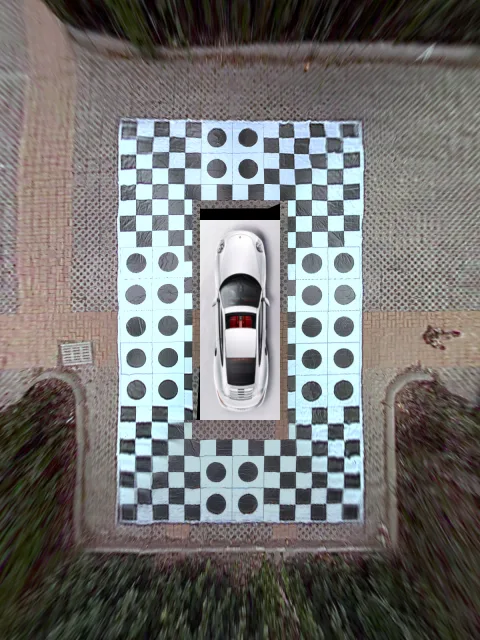
如何通过图像中已知角点坐标反求相机位置:PnP外参估计实践
已知相机内参,已知场景中几个点的 3D 坐标,从图像中找到这些点的像素位置,求解相机在三维世界中的位姿——这就是 Perspective-n-Point(PnP)问题。本文涉及的工具已开源。
41
|
0
从四路鱼眼到鸟瞰图:BEV 环视原理与 surround-view-system-introduction 工程精读
本文围绕开源工程 [surround-view-system-introduction](https://github.com/neozhaoliang/surround-view-system-introduction),分享了相关知识记录
171
|
0
鱼眼相机也能做双目测距?——双鱼眼深度估计探索
两个鱼眼相机虽然畸变大、不水平对齐、光轴不平行,但如果它们有固定基线和明显的重叠视野,能否构成一个非标准的双目立体对来做三角化测距?
答案是可行的。本文记录完整的探索过程、实验结果和工程经验。
本文涉及的部分代码已开源在 GitHub。
79
|
0

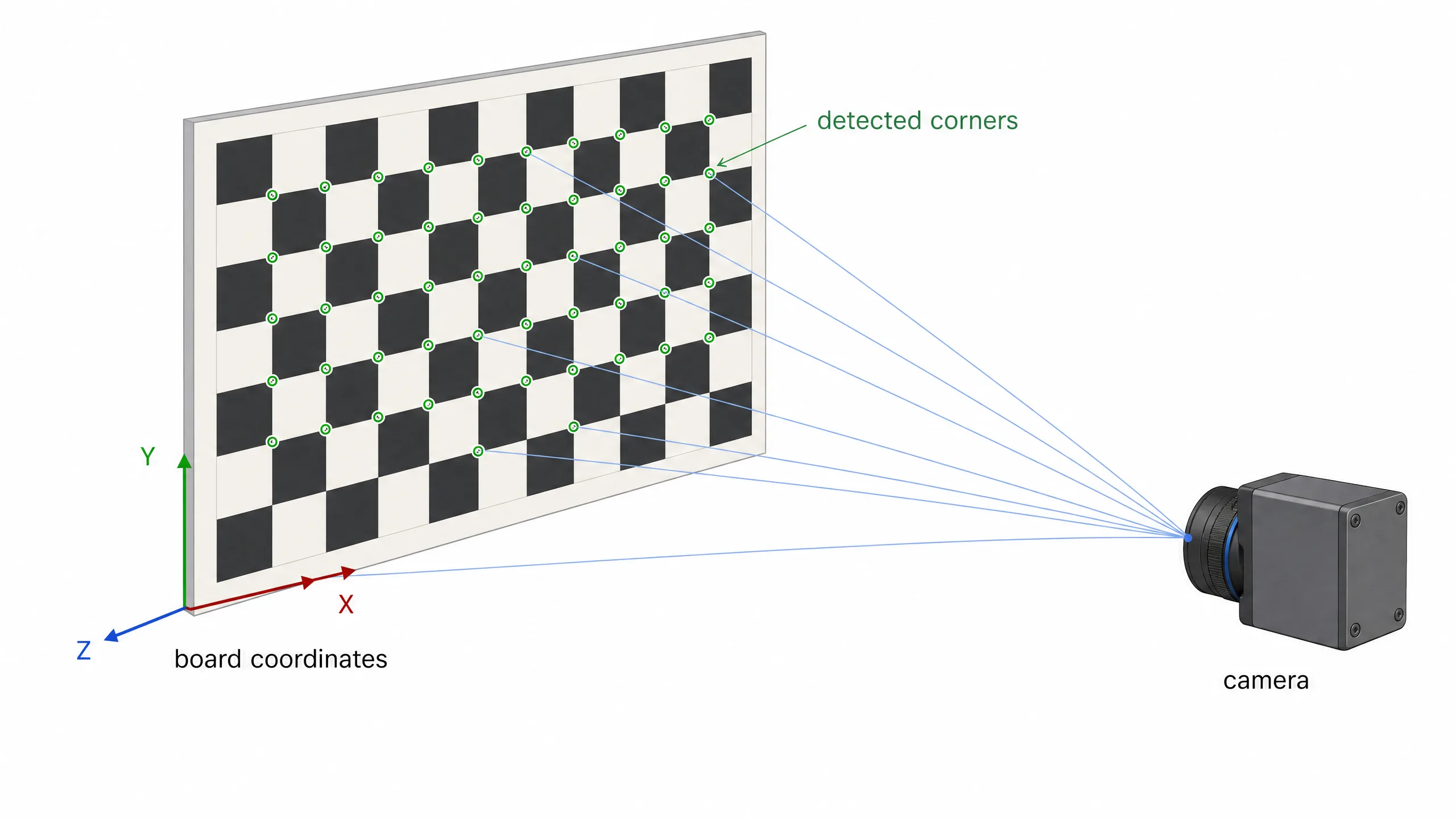
相机标定入门:内参、外参、畸变与棋盘格标定
相机标定是计算机视觉的"第一公里"。
这篇文章从工程视角出发,解释四个问题:
1. 相机怎么把三维世界拍成二维图像?(针孔模型)
2. 为什么图像会有畸变?怎么描述这种畸变?
3. 内参和外参分别代表什么?它们之间是什么关系?
4. 棋盘格标定到底在算什么?重投影误差怎么看?
363
|
0