
© 2026 硅基之瞳

LeHome Challenge @ ICRA 2026 个人参赛复盘
本文记录了我以个人身份参加 ICRA 2026 LeHome Challenge 的完整过程。从环境搭建、数据准备,到 ACT / Diffusion Policy / SmolVLA / pi0.5 四条技术路线的尝试与取舍,再到最终方案的选择与提交。重点不是晒成绩,而是记录真实参赛者在有限时间和资源下的路线决策过程与工程踩坑经历。
107
|
0

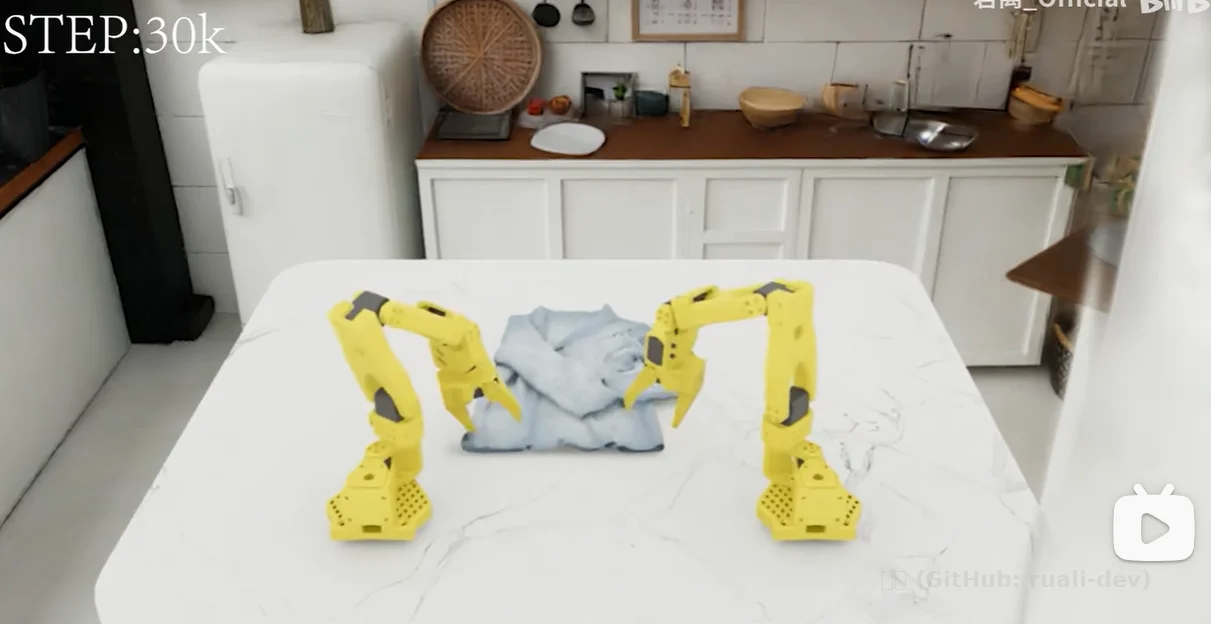
Scaling 的力量与边界:LeHome SmolVLA 从 30k 到 90k 的训练复盘
在 30k baseline 提交之后,我继续对 SmolVLA 进行 scale:从 30k → 50k → 70k → 90k 逐步加训,每阶段评测四类衣物的效果。本文详细对比 70k 和 90k 在四类任务上的完整评测结果,记录"为什么明明 90k 多训了 20k 步,最终却选了 70k",以及我对 scaling 在这个任务上演化趋势的观察。
13
|
0

LeHome 尝试 pi0.5:依赖地狱、LoRA 微调与截止前的放弃
我试图用 pi0.5 冲一波分。结果一头扎进了依赖地狱:LeRobot pi0.5 需要特定版本的 transformers(4.53.2,不是 4.57.6)、需要 OpenPI 的 `transformers_replace` 补丁、需要 Hugging Face token 授权 paligemma 模型。本文记录完整的排障过程、LoRA 微调训练(sanity check → 30k → 150k → 270k)、以及最终"初具人形但依旧悬空"的评测效果。在截止前未能得到可用结果,pi0.5 最终未作为主力方案。
197
|
0

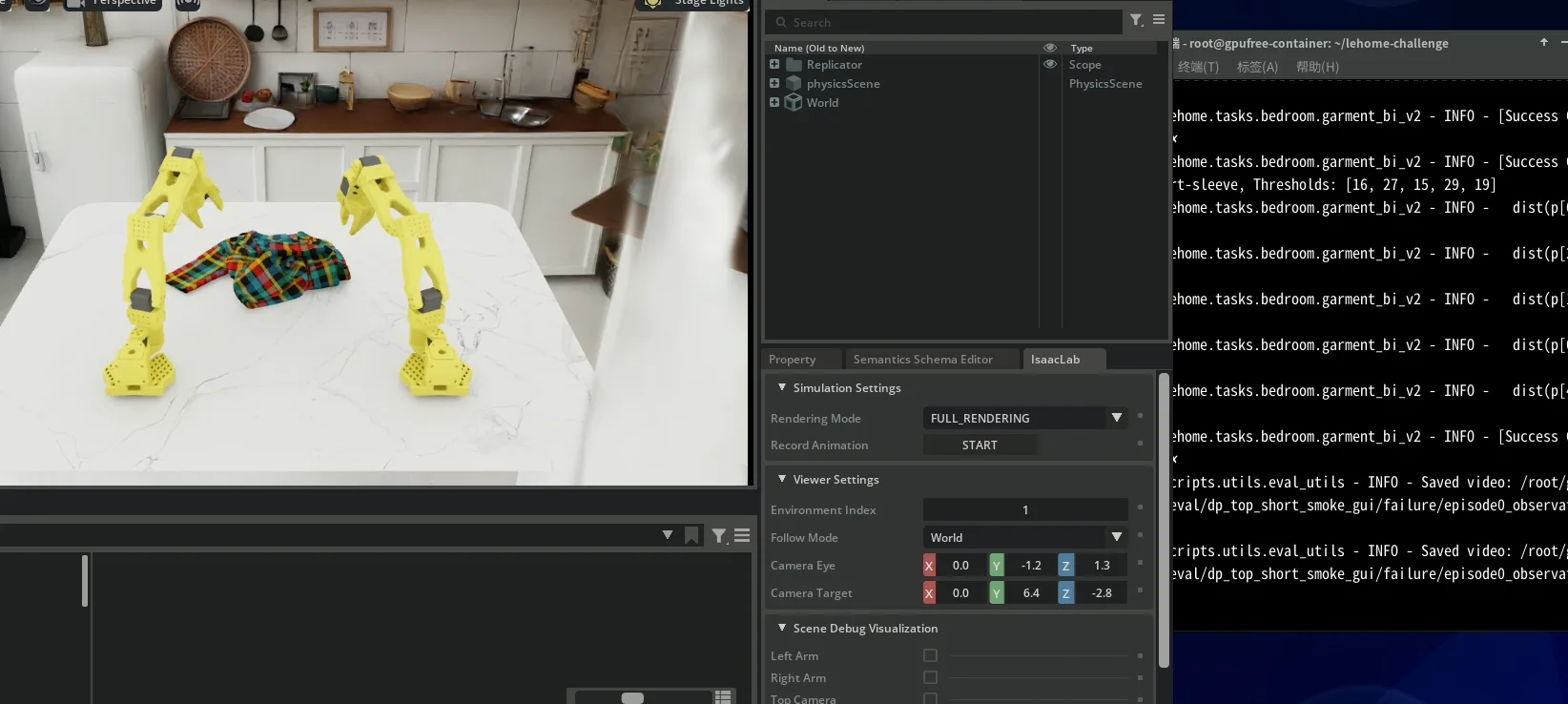
LeHome SmolVLA 微调:从 Smoke Test 到 Baseline 提交
在 ACT 和 DP 之后,我开始尝试 SmolVLA。选择 SmolVLA 的理由很简单——它是一个相对轻量的 VLA 模型,官方提供了预训练权重和训练配置,在有限算力下跑起来比较现实。本文记录从首次 smoke test、发现并修复 camera key 不兼容问题(自定义 Policy)、到 30k 四类 baseline 训练的完整过程。最终四类评测结果:top_short 8.33%、top_long 50.00%、pant_long 16.67%、pant_short 75.00%。
98
|
0
LeHome 跑 Diffusion Policy:不太理想的尝试
在 LeHome Challenge 中,我在跑通 ACT baseline 之后尝试了 Diffusion Policy。结果不太理想——`top_short` 任务上 30k 成功率为 0%,50k 仅 16.67%。本文记录完整的尝试过程:从 DP smoke test 到长训、从发现左手抓取偏置到逐步 debug(policy 输出日志、环境执行日志、expert replay 对照、单件测试),以及最终判断——问题更可能是 DP rollout 不稳定而非数据或配置错误。同时也发现当时的实验环境代码基线落后官方 main,可能影响了 DP 的结果。
18
|
0
LeHome ACT Baseline 跑通记录:从环境排障到训练、评测与导出视频
本文记录 LeHome Challenge 官方 ACT(Action Chunking Transformer)Baseline 的完整跑通过程。从 Isaac Lab 环境排障(setuptools 82 兼容性问题)、数据迁移策略、训练配置、评测流程到视频导出,一步步还原真实操作路径。在 `top_short` 单类任务上,ACT 30k step 取得了 58.33% 的成功率。文末附完整的可执行命令和避坑指南。
74
|
0
SO-101 Follower 迁移到最新版本官方 LeRobot 框架记录
本文记录了将 SO-101 Follower 机械臂从社区版 LeRobot 分支迁移到官方最新版 LeRobot 框架的完整过程。主要内容包括:使用 uv 创建独立 Python 3.12 环境、安装官方仓库并启用 feetech 扩展、硬件连接与串口识别、舵机配置与校准、以及冒烟测试验证。迁移成功实现了机械臂在官方框架下的基础功能,包括串口识别、电机配置、校准和最小控制测试,为后续实验提供了标准化的开发环境。
89
|
0
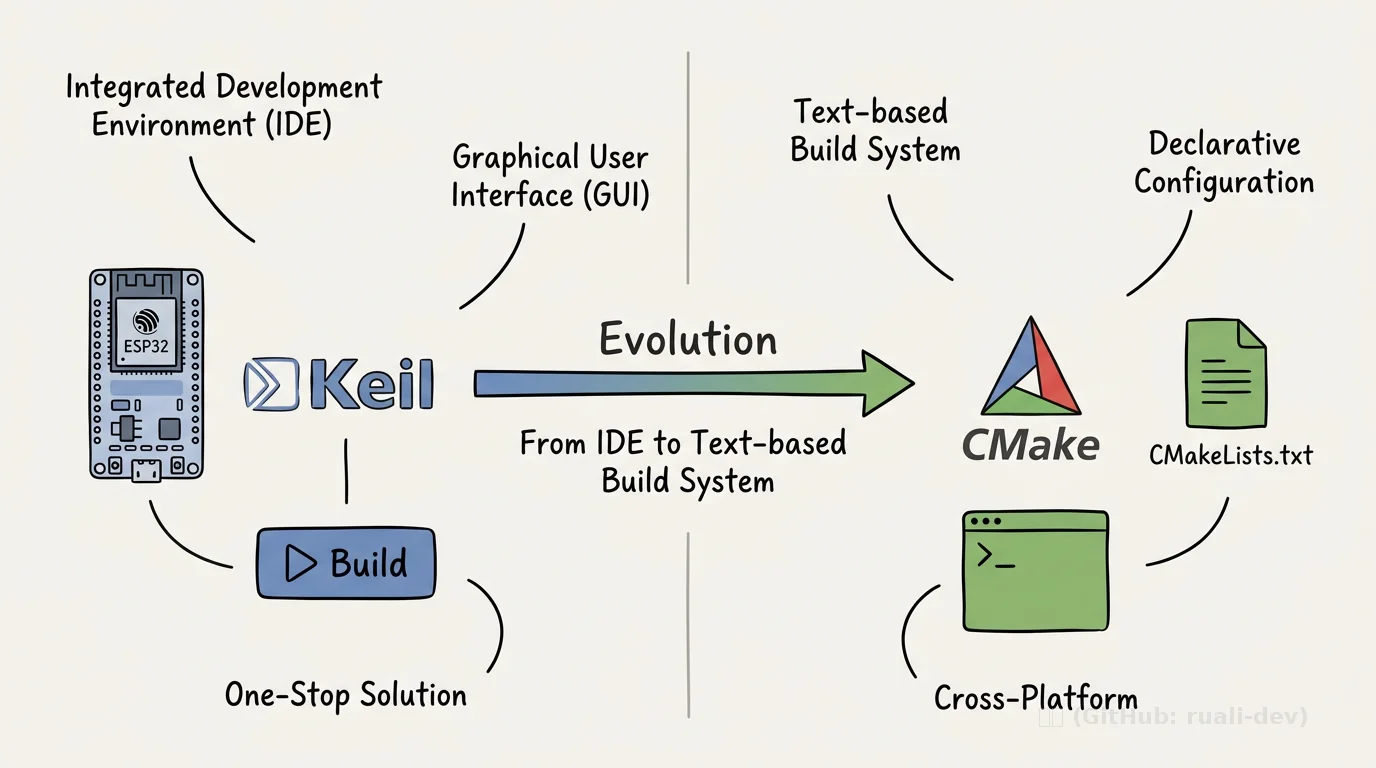
从 Keil 到 CMake:嵌入式构建系统是怎么进化的?
这篇文章源于一次真实的嵌入式构建问题。我想聊聊从 IDE 主导到文本构建系统的演进,顺便也看看 AI 和构建系统未来怎么协作。
30
|
0

个人项目:Lerobot机械臂和模仿学习相关实践(基于SO101)
本项目基于SO101单臂机械臂平台,实践并评估了动作分块Transformer(ACT)模仿学习算法。复现了基础抓放任务并实现了苹果自动削皮功能;通过系统实验分析了ACT在真实抓放任务中的表现。此外,独立开发了一套基于Web的机器人远程控制与可视化系统。
130
|
0
