

摘要
本文记录 LeHome Challenge 官方 ACT(Action Chunking Transformer)Baseline 的完整跑通过程。从 Isaac Lab 环境排障(setuptools 82 兼容性问题)、数据迁移策略、训练配置、评测流程到视频导出,一步步还原真实操作路径。在
top_short单类任务上,ACT 30k step 取得了 58.33% 的成功率。文末附完整的可执行命令和避坑指南。
正文
1. 背景
考研下岸了,但是生活还是要继续。毕业之前总得做点东西,不然怎么说自己本科是学机器人的呢。最近刷到个比赛,感觉有点意思。之前做 manipulation 都是简单的 pick and place,这次来试试具身方法最擅长的 deformable object manipulation。隔壁传统控制看到都馋哭了。
这篇文章专注一件事:用仿真环境(Isaac Sim)跑通一次 top_short 任务的 ACT baseline 训练 + 评测 + 视频导出。
2. 算力环境
比赛需要跑 Isaac Sim,我本地没有能跑的 GPU。上网找到一个算力平台,正好有 LeHome 官方镜像,配置:
- GPU:L40 48G
- CPU:14 核
- 内存:128G
- 系统盘:30G(停机清空)
- 数据盘:50G(按量付费)
平台自带的网页远程桌面很卡,疑似普通 VNC,老老实实 SSH。
3. 数据准备
如果和我一样用现成镜像,多半没有数据集。先下载:
nvidia-smi # 看看当前配置
cd /root/lehome-challenge # 镜像预装路径
ls Assets
ls Datasets/example
# 没有就下载
hf download lehome/asset_challenge --repo-type dataset --local-dir Assets
hf download lehome/dataset_challenge_merged --repo-type dataset --local-dir Datasets/example
4. 数据迁移:系统盘 → 数据盘
系统盘很小(30G),每次停机数据清空。merged 数据集有 18G,放在系统盘容易撑爆。数据盘按量付费,合理得多。
数据盘路径:/root/gpufree-data
我的方案:把数据拷到数据盘,原路径用符号链接指过去。
# 创建目标目录
mkdir -p /root/gpufree-data/lehome/Datasets/example
# 复制数据
cp -a /root/lehome-challenge/Datasets/example/. /root/gpufree-data/lehome/Datasets/example/
# 校验大小
du -sh /root/lehome-challenge/Datasets/example
du -sh /root/gpufree-data/lehome/Datasets/example
大小接近就继续:
# 备份 → 软链接 → 验证 → 删备份
mv /root/lehome-challenge/Datasets/example /root/lehome-challenge/Datasets/example.bak
ln -s /root/gpufree-data/lehome/Datasets/example /root/lehome-challenge/Datasets/example
ls -ld /root/lehome-challenge/Datasets/example
readlink -f /root/lehome-challenge/Datasets/example
# 看到 .../example -> /root/gpufree-data/lehome/Datasets/example 就对了
rm -rf /root/lehome-challenge/Datasets/example.bak
5. 验证仿真环境和数据可用性
先放个 replay 看看。replay 能验证这几件事:
- 数据路径对不对
- 仿真环境能不能启动
- Isaac Lab / Isaac Sim 是否可用
- 资产是否完整
cd ~/lehome-challenge
python -m scripts.dataset_sim replay \
--dataset_root Datasets/example/top_short_merged \
--num_replays 1 \
--disable_depth \
--device cpu \
--enable_cameras
6. 修 Isaac Lab 安装问题
果然先验证是有必要的。报错:
ModuleNotFoundError: No module named 'isaaclab'
看报错像是 Isaac Lab 没装进环境。可能是预装镜像的问题。
6.1 第一次诊断
python -V
ls third_party
test -d third_party/IsaacLab && echo "IsaacLab repo exists" || echo "IsaacLab repo missing"
python -c "import isaaclab; print(isaaclab.__file__)"
还是报 ModuleNotFoundError。
6.2 按官方文档重装
cd /opt/lehome-challenge
source .venv/bin/activate
# 没有 IsaacLab 仓库就补 clone
test -d third_party/IsaacLab || git clone https://github.com/lehome-official/IsaacLab.git third_party/IsaacLab
# 按官方文档安装 IsaacLab 到当前 .venv
./third_party/IsaacLab/isaaclab.sh -i none
# 再把 lehome 包重新装进当前环境
uv pip install -e ./source/lehome
# 验证
python -c "import isaaclab, lehome; print('isaaclab ok:', isaaclab.__file__); print('lehome ok:', lehome.__file__)"
然而还是报错。具体是 flatdict==4.0.1 构建失败:
ModuleNotFoundError: No module named 'pkg_resources'
6.3 找根因
查 GitHub 发现最近上游有人报过几乎同一类错误:安装 IsaacLab 时因为 flatdict 构建阶段找不到 pkg_resources,最终表现成 ModuleNotFoundError: No module named 'isaaclab'。
根因:setuptools 82.0.0 在 2026 年移除了 pkg_resources,而老包 flatdict==4.0.1 在 build isolation 里还依赖它。
6.4 修复方案
思路:
- 把
setuptools压回还带pkg_resources的版本 - 用
--no-build-isolation,避免它新开隔离构建环境丢掉pkg_resources - 单独把核心包
isaaclab补装进去
source .venv/bin/activate
python -m pip install "setuptools<82" wheel
uv pip install "setuptools<82" wheel
uv pip install --no-build-isolation flatdict==4.0.1
uv pip install --no-build-isolation -e ./third_party/IsaacLab/source/isaaclab
python -c "import isaaclab; print('isaaclab ok:', isaaclab.__file__)"
python -c "import lehome; print('lehome ok:', lehome.__file__)"
再次跑 replay:
python -m scripts.dataset_sim replay \
--dataset_root Datasets/example/top_short_merged \
--num_replays 1 \
--disable_depth \
--device cpu \
--enable_cameras
成功跑通。可以开始训练了。
7. ACT 训练
先试最简单的 top_short,四类一起上确实遭不住。
7.1 训练配置
cd ~/lehome-challenge
cp configs/train_act.yaml configs/train_act_top_short_ruali.yaml
修改内容:
dataset:
repo_id: repo_act_top_short_ruali
root: Datasets/example/top_short_merged
policy:
type: act
device: cuda
push_to_hub: false
input_features:
observation.state:
type: STATE
shape: [12]
observation.images.top_rgb:
type: VISUAL
shape: [3, 480, 640]
observation.images.left_rgb:
type: VISUAL
shape: [3, 480, 640]
observation.images.right_rgb:
type: VISUAL
shape: [3, 480, 640]
output_features:
action:
type: ACTION
shape: [12]
output_dir: /root/gpufree-data/lehome-outputs/train/act_top_short
batch_size: 16
steps: 30000
save_freq: 5000
log_freq: 1000
wandb:
enable: false
主要改了三个地方:
dataset.root→Datasets/example/top_short_mergedoutput_dir→ 数据盘路径policy.device→cuda
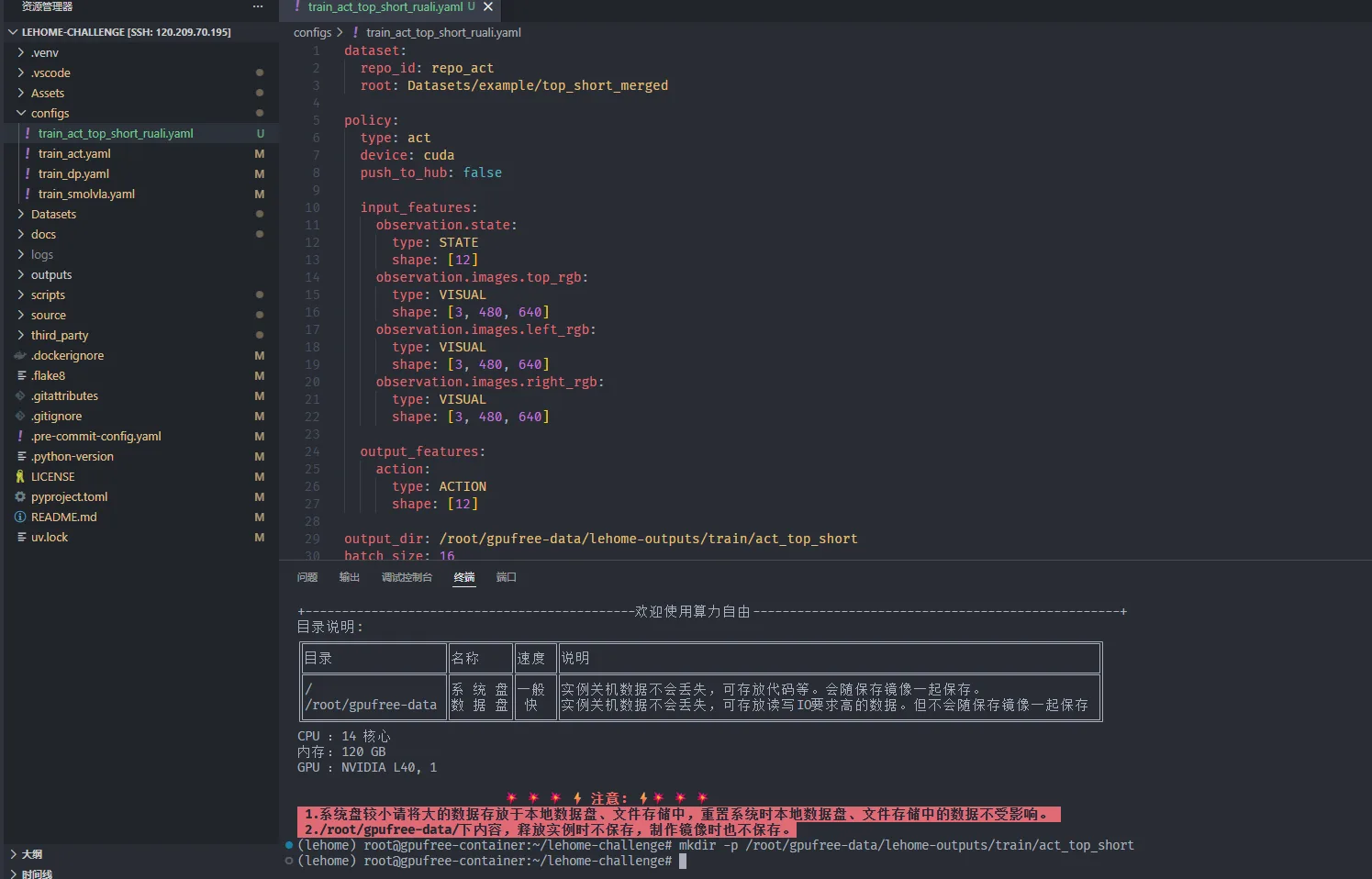
7.2 一个小坑:不要提前创建 output_dir
这是 LeRobot 的一个坑。如果你提前 mkdir -p 了输出目录,训练会报:
FileExistsError: Output directory ... already exists and resume is False
因为默认 resume = false,它不允许输出目录已存在。正确做法:不提前创建训练输出目录,只创建日志目录。
mkdir -p /root/gpufree-data/lehome-outputs/logs
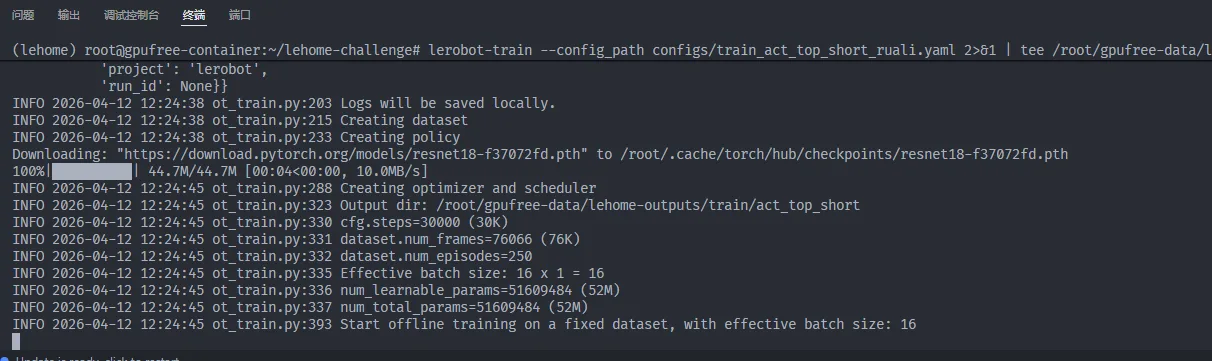
7.3 启动训练
lerobot-train --config_path configs/train_act_top_short_ruali.yaml \
2>&1 | tee /root/gpufree-data/lehome-outputs/logs/act_top_short_train.log
训练开始后看到:
Creating dataset
Creating policy
Creating optimizer and scheduler
Output dir: /root/gpufree-data/lehome-outputs/train/act_top_short
Start offline training on a fixed dataset
说明数据加载、模型创建、优化器创建、输出目录创建都成功了。
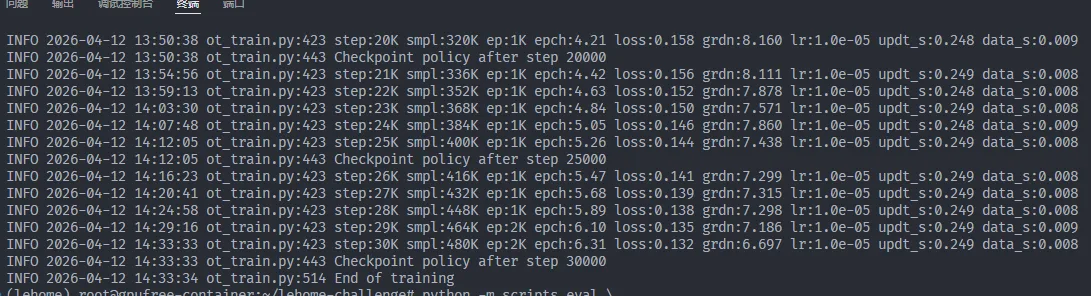
7.4 训练速度
实际日志节奏:
- 1000 step ≈ 4~5 分钟
- 30000 step 总耗时 ≈ 2 小时多一点
中间自动保存 checkpoint:5000、10000、15000、20000、25000、30000。
训练结束标志:
Checkpoint policy after step 30000
End of training
7.5 要不要早停
这次我没有早停,直接跑满了 30000 step。经验上,如果 loss 还在明显下降,不建议 15K 就停。先把一趟 baseline 跑完整,再去比较不同 checkpoint 的效果。
8. ACT 评测
8.1 评测命令
cd ~/lehome-challenge
source .venv/bin/activate
mkdir -p /root/gpufree-data/lehome-outputs/eval/act_top_short
python -m scripts.eval \
--policy_type lerobot \
--policy_path /root/gpufree-data/lehome-outputs/train/act_top_short/checkpoints/last/pretrained_model \
--dataset_root Datasets/example/top_short_merged \
--garment_type top_short \
--num_episodes 2 \
--enable_cameras \
--save_video \
--video_dir /root/gpufree-data/lehome-outputs/eval/act_top_short \
--device cpu \
--headless
参数说明:
--policy_type lerobot:使用 LeRobot policy 路径--policy_path .../last/pretrained_model:用最终 checkpoint--dataset_root:评测数据集--garment_type top_short:只测短袖--num_episodes 2:每件衣服跑 2 次--enable_cameras:保存相机图像--save_video:导出 mp4--video_dir:视频输出目录--device cpu:仿真跑在 CPU--headless:无 GUI 模式
8.2 验证评测输出
find /root/gpufree-data/lehome-outputs/eval/act_top_short -type f
看到类似以下文件就说明评测和视频导出成功:
.../success/episode0_observation_images_top_rgb.mp4
.../success/episode1_observation_images_left_rgb.mp4
.../success/episode0_observation_images_right_rgb.mp4
...
8.3 下载评测视频到本地
服务器上打包:
cd /root/gpufree-data/lehome-outputs/eval
tar -czf act_top_short_eval.tar.gz act_top_short
本地用 scp 下载:
scp -P 端口 root@你的服务器IP:/root/gpufree-data/lehome-outputs/eval/act_top_short_eval.tar.gz .
8.4 有 GUI 的评测
无头模式只能保存相机视角视频。想看 Isaac Sim 画面的话,用平台自带的浏览器面板,跑不带 --headless 的版本:
python -m scripts.eval \
--policy_type lerobot \
--policy_path /root/gpufree-data/lehome-outputs/train/act_top_short/checkpoints/last/pretrained_model \
--dataset_root Datasets/example/top_short_merged \
--garment_type top_short \
--num_episodes 1 \
--max_steps 300 \
--enable_cameras \
--device cpu
8.5 评测结果
Total Episodes: 12
Success Rate: 58.33%
每件衣服的细分结果(略)。几点说明:
Top_Short_Seen_0~Top_Short_Seen_9是 Seen 实例Top_Short_Unseen_0、Top_Short_Unseen_1是 Unseen 实例Seen / Unseen是实例划分,不是袖长划分- ACT 在 Seen 和 Unseen 上都能成功
9. success / failure 判断机制
查看了官方仓库的评估代码:
LeHome 不是看"视频好不好看"来判成功的。它在检查衣服网格/粒子模型上的若干关键检查点之间的距离关系。
简化理解:
- 取布料模型上的几个固定点
- 计算这些点之间的距离
- 判断是否满足阈值
- 满足 →
success,不满足 →failure
这意味着即便 rollout 看起来"动作挺像那么回事",如果最终几何关系没达标,评价就是 failure。
10. 总结
这次跑通 LeHome 官方 ACT baseline,最头疼的不是训练,而是一开始的环境排障。setuptools 82 移除 pkg_resources 导致 flatdict 构建失败,这种问题在论文里永远不会写,但实际做项目天天遇到。
对于 LeHome 这种活动,按照经验,都是先跑通一份 baseline 然后再谈其它。ACT 30k 在 top_short 上 58.33% 的成功率不算高,但至少证明了环境和流程是完整的,可以在此基础上尝试其他方法。