
© 2026 硅基之瞳

ESP-IDF编译国内某厂商ESP32-S3 LCD套件官方例程——屎山代码修复实录
本文记录了修复xx电子 ESP32-S3-Touch-LCD-3.49 套件官方 ESP‑IDF 例程的完整过程。
49
|
0

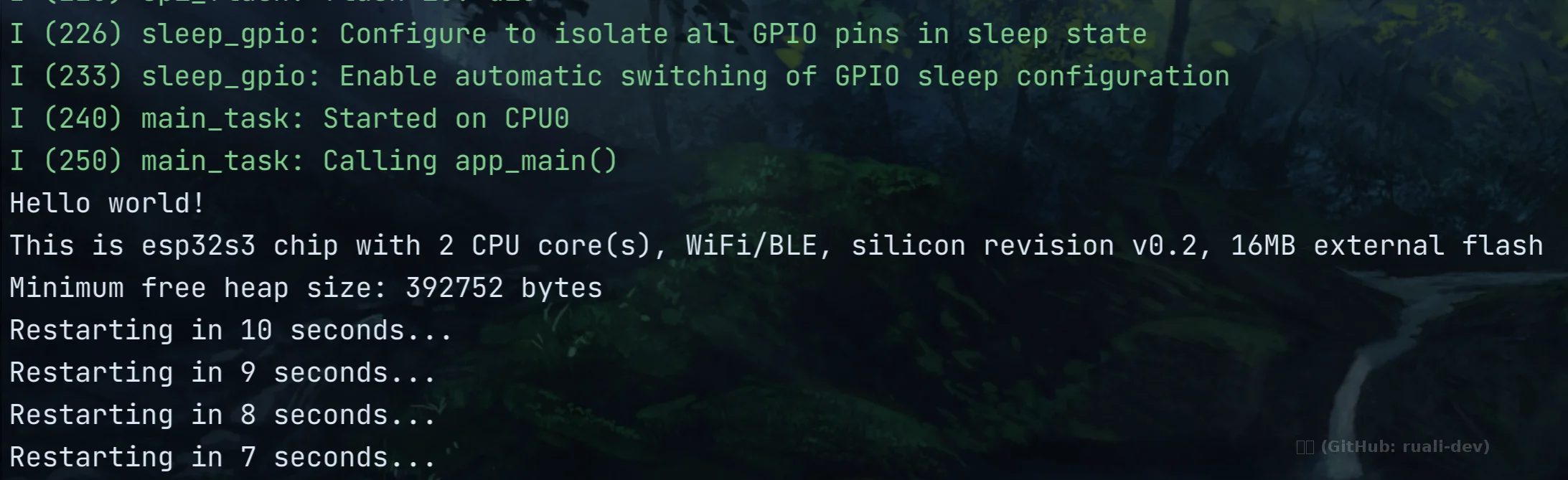
Linux嵌入式开发ESP32-S3——ESP-IDF的安装和进行项目构建与烧录(命令行)
在Linux开发环境下完成了ESP-IDF工具的安装,并且编译了官方例程,成功连接开发板并烧录例程进行验证
61
|
0

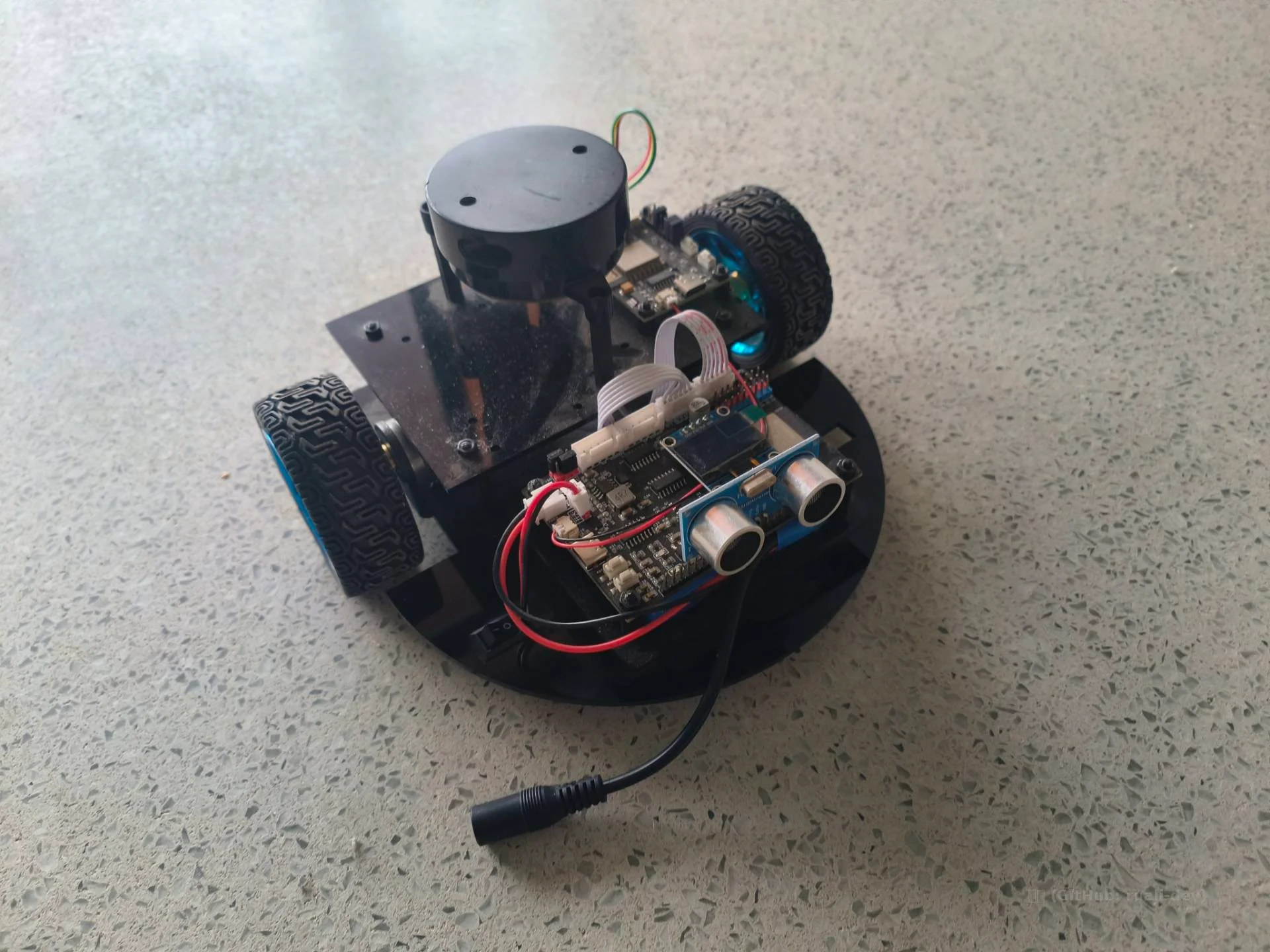
个人项目:基于 ROS2 的激光雷达小车 SLAM 与自主导航系统
2026-02-15
2026-02-16
个人项目:基于 ROS2 的激光雷达小车 SLAM 与自主导航系统 项目时间:2024.09 – 2024.10 技术栈:ROS2 Humble / Navigation2 / Cartographer / slam-toolbox / Micro-ROS / ESP32 / 分布式架构 视频展示:
221
|
0
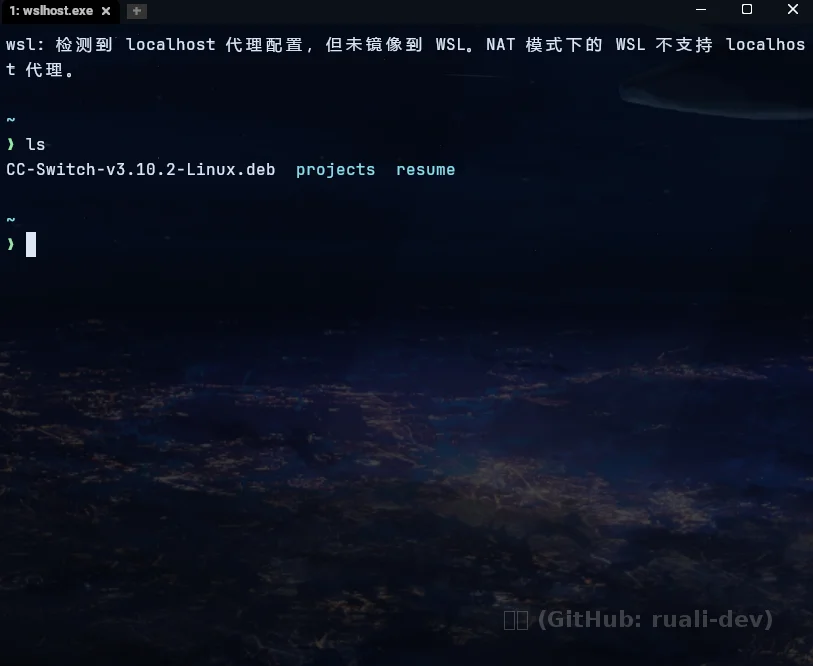
Win11 + WSL + WezTerm 打造 Warp 风半透明终端
在 Windows 11 + WSL 环境下,通过 WezTerm 配置透明背景与自定义配色,并结合 Codex 辅助完成终端美化,最终实现接近 Warp 风格的现代化开发终端环境。
1037
|
0
PyTorch Tutorial 学习记录(Learn-the-Basics完结篇) - Save and Load the Model
本章聚焦 PyTorch 模型的保存与加载:为什么推荐保存 state_dict、如何安全地 torch.load(weights_only=True),以及保存整个模型为何被视为 legacy 用法。并以 FashionMNIST 的 MLP 为例,跑通从训练到推理验证的完整流程。
19
|
0
PyTorch Tutorial 学习记录——Optimizing Model Parameters
本文记录 PyTorch 官方教程“Optimizing Model Parameters”的学习过程,梳理训练所需的超参数、损失函数与优化器,并用 FashionMNIST + MLP 示例串起“前向→算损失→反向传播→参数更新”的完整训练/评估流程。
21
|
0
深度学习的反向传播——神经网络如何学习
基于 3Blue1Brown 深度学习系列视频,系统梳理了从 Loss、梯度下降到反向传播的核心逻辑,并结合直觉理解、数学推导与 PyTorch 实现,帮助建立“神经网络如何学习”的完整认知框架。
35
|
0
PyTorch Tutorial 学习记录——Build the Neural Network
本章主要理解了 nn.Module 的模型定义方式、forward 机制、logits 与 softmax 的关系,以及参数的训练流程,为后续训练与优化打基础。
12
|
0